Project Abstract
Project Abstract:
Our project aims to improve how scientists study underwater environments by creating a special type of robot. We’ve noticed that animals, like jellyfish, are efficient at moving in water, much better than most robots. So, we want to make a robot inspired by jellyfish that uses less energy. This robot, will imitate how real jellyfish move. By mimicking nature, we hope to give scientists a tool to study underwater ecosystems without disturbing them. Through this project, we hope to help scientists learn more about aquatic environments and inspire others to invent even better robots for the future.
Building process
The robot is made of 3 main components the soft skirt and arms, the center housing, and the circuitry. these components are built separately and then assembled at the end.
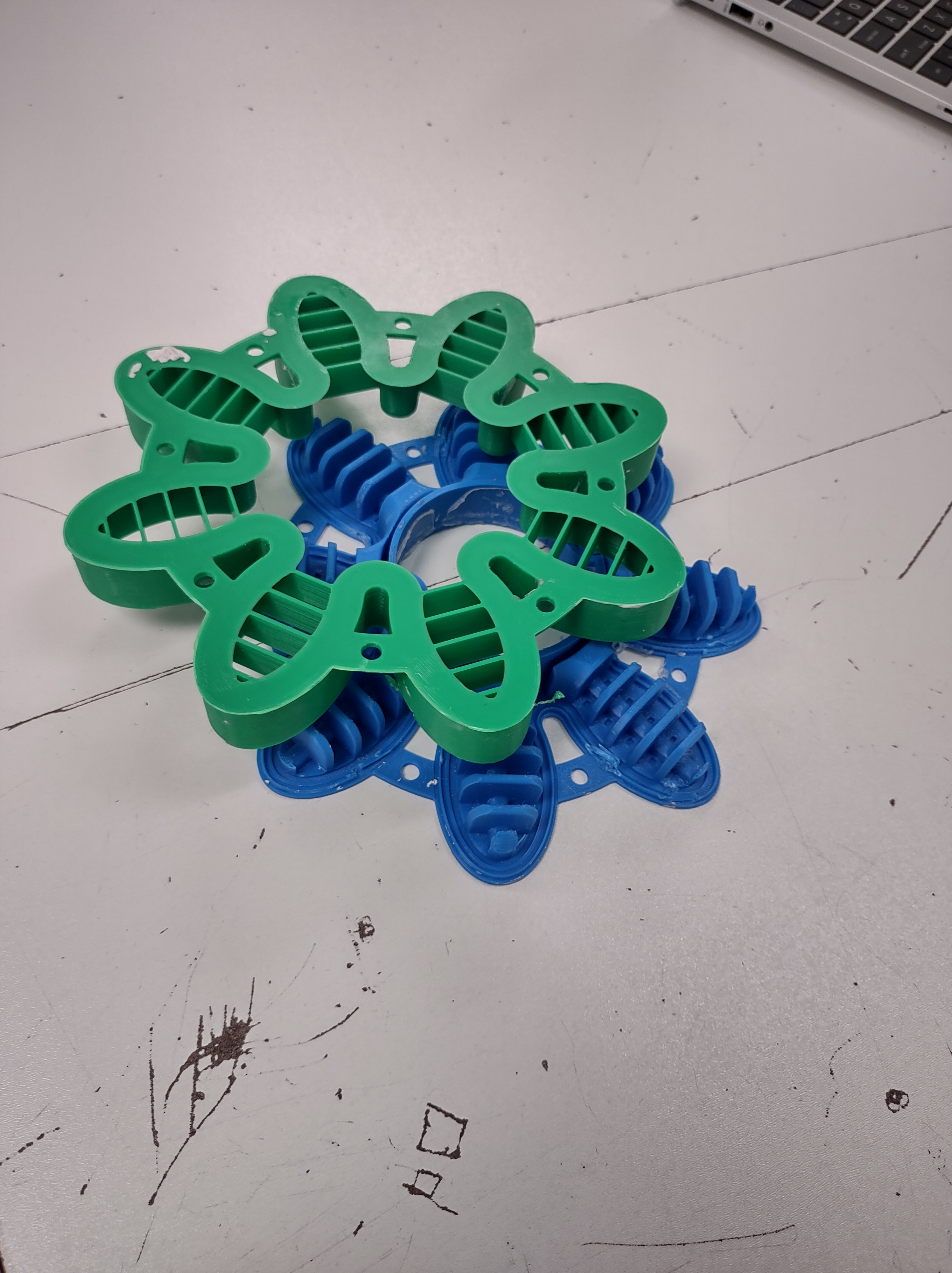
soft skirt
- 3D print the molds for the skirt and arms
- Cut the skirt insert out of thin fabric using the templet
- Before casting the arms spray the 3D print with mold release and use clay to seal the gaps between the mold half’s.
- Pour the silicone into the mold (We used smooth-on Ecoflex 00-30)
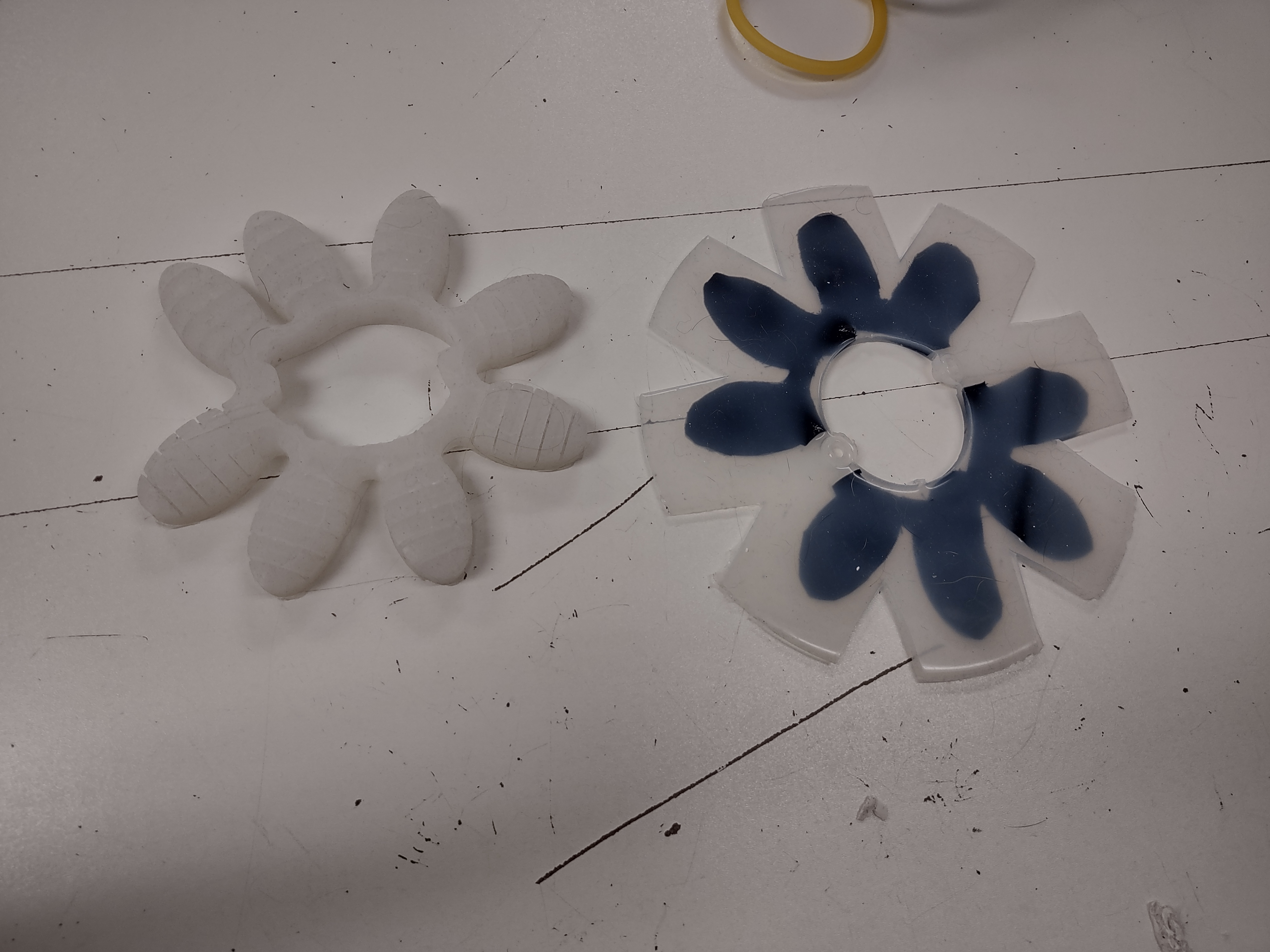
- To make the skirt portion spray with mold release then pour the mold half way full with silicon and add the fabric cut out before then fill the rest of the mold
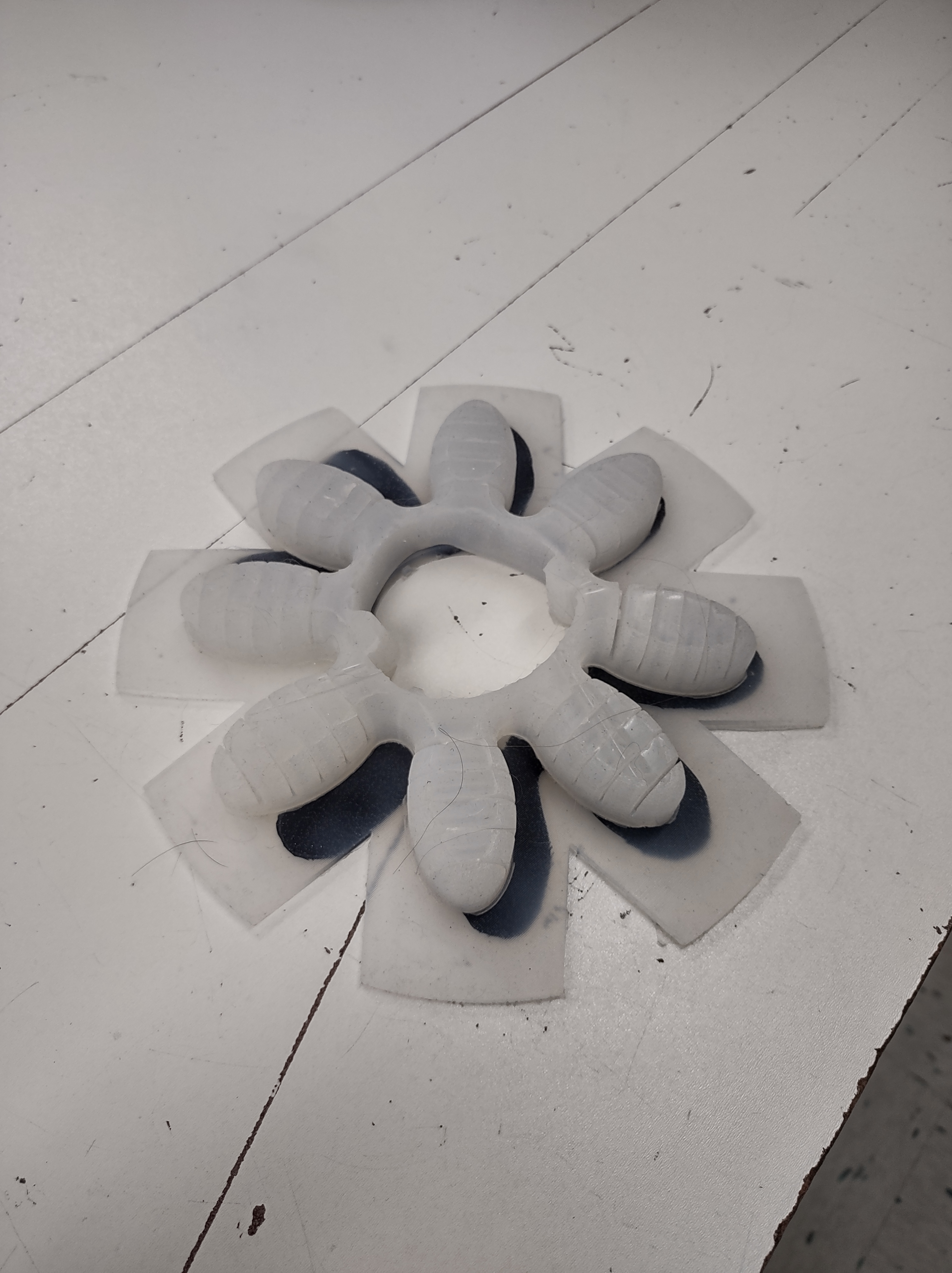
- Once you have both pieces of silicon made use more silicon to bond them together to make an air tight chamber (this make take serval applications of silicon to seal all holes

Center HOUSING
- 3D print the jellyfish body and cap (10% scale)
- Cut a 2.6inch circal of Plexiglas for part of cap
- Use XT-3D on the 3D prints to water profe them
- Use jb weld marine epoxy to plug holes in bottom of container
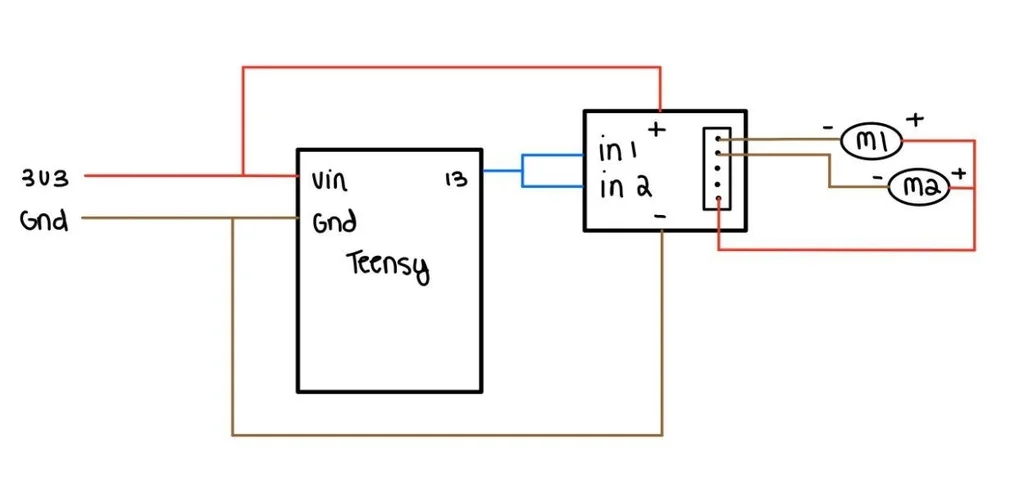
CIRCUITS
Code
/*
Turns on motor on for -- second, then off for -- second, repeatedly.
*/
// Pin 13 has a motor connected
int motor = 13;
void setup() {
pinMode(motor, OUTPUT);
}
void loop() {
digitalWrite(motor, HIGH); // turn the motor on (HIGH is the voltage level)
delay(1400); // wait for 1.4 seconds
digitalWrite(motor, LOW); // turn the motor off by making the voltage LOW
delay(900); // wait for 0.9 seconds
}
Video
Project Summary
This project taught me alot about manufacturing and rapid prototyping as that was the main challenge of the project being the build process itself and the soft skirt was perticaly difficult. As it took a lot of time to make the two parts and i need too remake on of the parts. I also struggled with the working with the very small wires I used and had many of them break of and need to be resoldered if I were to make this again I would use better wires and setup the wiring so I could control each side separately, I would also spend more time degassing the silicon to remove the air in trapped in the silicon. overall I think that the project went very well for a first prototype.
Connection to Biology
This Robot will look and move like a real Jellyfish. This is biomimicry as we are using the appearance and structure of a real jellyfish to design the way are robot will work and move. We also wanted to make a tool that could be an efficient way for scientists to study aquatic environments.